������-������
����˵Ӳ����������������꣬ǰ���Ѿ�������ң��̹�˵�Ӳ�����ֽ��������Ǹ�ȥʵ���������������ˣ�˵����д����������ǵ�̹�����Ԥ�ƹ��ܡ�����ǰ�����ֵ�����֪�����ǵ�Ӳ��ϵͳ��Ϊ�����֣�������̹��ϵͳ���ֱ�ϵͳ������Ҫ�ֱ�Ϊ������ϵͳ��д�����������������һ��̹��һ�˵������ܹ�����ͼ6-1��
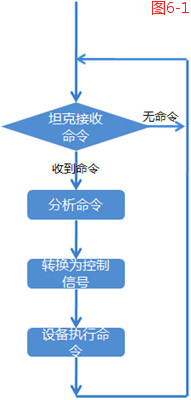
��ͼ�������ܿ���̹��һ���ڲ��ϵĽ�����������������ͽ�������Ȼ��ִ��������û��������ô������һ�ν��������̹֮��һ���ϵ���ڲ�ͣ�Ľ�������ֱ���رյ�Դ�������������Դ������Ϊ�ο������ǵ���Щ���Ѳ�̫��Ϥ�������Ϊ��Ӱ���Ҷ�ԭ�������⣬�ڴ�����ʹ���˺ܶ�ע�ͺ�α������������ܶ�������Ϣ����ͼ6-2��
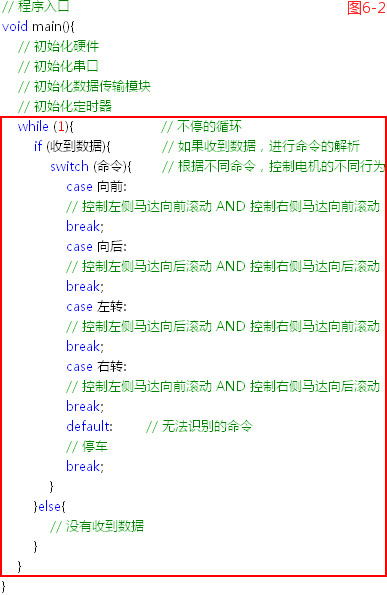
��ͼ�����ǿ��������Ŀ��������ִ�й��̣�ϵͳ����ֹ����ѭ����������������ִ��������к�ɫ��������γ�������壬���ǻᷢ�����ĺ��ľ��ǿ��Ƶ������ת����ô���ͨ�����������Ƶ������ת�أ����Ҫ����һ��ǰ����ܵ�Ӳ����·�ˣ���ң��̹��DIY���̽���(02)��������ͼ6-3��
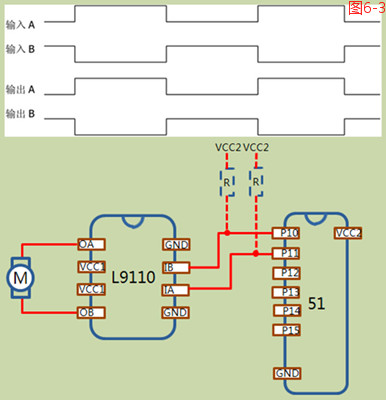
����L9110�Ĺ���ʱ��ͼ�Լ����ǵ�Ӳ��ԭ��ͼ�����ǿ�������Ŀ���Ҫ���õ����ת����ֻҪ�õ�Ƭ��������IO����P10��P11�������Ϳ����ˣ����ת���ɴ�����ͼ6-4��ʾ��
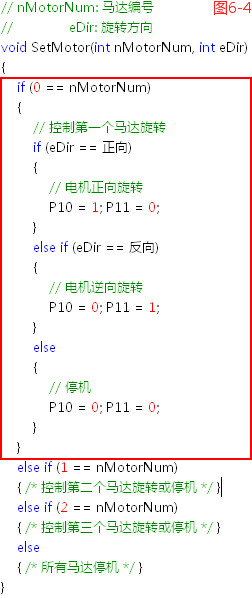
��ͼ�к�ɫ�����б�ʾ���Ƕ�һ������Ŀ��ƣ�������2������Ŀ��Ʒ���Ҳ��һ���ģ����е����������Ѿ�����ͨ�����������Ƶ������ת�ˣ�ֻҪ��ȷ��Э��3���������ת�������ǾͿ��������ǵ�̹�����ǰ�������ˡ���ת����ת������˳ʱ����ת�Լ�������ʱ����ת�⼸�����ܡ�
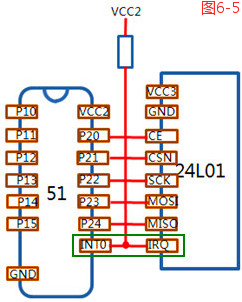
��ôϵͳ�����֪���Ѿ����յ����ݵ��أ�ֻҪ��2�ַ�����һ�ַ����Ƕ�NRF24L01��״̬���Ͻ��в�ѯ����һ�ַ����ǵ�NRF24L01���յ������Ժ�����֪ͨMCU���������ǵ�Ӳ��ԭ��ͼͬʱΪ�����ϵͳִ��Ч�ʣ����Dz��õڶ��ַ�����������ͼ6-5��6-6��
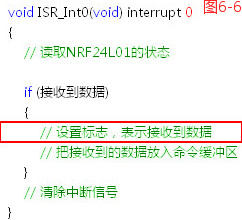
�����յ����ݴ���ģ�鴥�����жϺ�����ȥ��ȡ����ģ���״̬��������յ��������Ǿ�����һ����־��ͼ6-2�ij����ϲ�ѯ�����־��һ�����������ݷ��������Ϳ��Զ����ݽ��н����ˡ�
��Ȼ����������ʡ���˳�ʼ��Ӳ������ʱ���Լ�����ģ�����ϸ���裬��������DIY������Ҳ�������˾��弼�����⣬������ʱ�������ϻ�ѧϰ����ȻҲ�����롰@ZiShi�����н�����
���Ҫ��̹�������������յ���������ǿ��Զ���һЩ��Э�飬��ͼ6-7��

���������б���ͨ��˫���Ϳ��Ը��������Э�顱����ͨ���ˣ�����̹��һ�˽��յ�0X00����ô̹�˾�ȫ����ǰ�壬���̹��һ�˽��յ�0X02����ô̹�˾ͻ���ת����һ������Լ�������������б������Լ���̹����ɸ���Ĺ��ܡ�
̹��һ�˵ij���ԭ���Ѿ���������ˣ��������ǻ����������ң���ֱ�һ�˵ij���ԭ����
�����ȵ���������ĺ���������̳�ĸ�����ͼƬ����鿴ԭ��������
����������̳������鿴�����������ݡ�