圆点博士小四轴飞行器MPU6050和HMC5883L自我测试模式下的数据研究:
=======先来看MPU6040数据手册=============================
7.12 Self-Test
Self-test allows for the testing of the mechanical and electrical portions of the sensors. The self-test for each
measurement axis can be activated by controlling the bits of the Gyro and Accel control registers.
When self-test is activated, the electronics cause the sensors to be actuated and produce an output signal.
The output signal is used to observe the self-test response.
The self-test response is defined as follows:
Self-test response = Sensor output with self-test enabled – Sensor output without self-test enabled
The self-test response for each accelerometer axis is defined in the accelerometer specification table
(Section 6.2). Similarly, for the gyro axes, self test allows the proof masses to be moved equivalent to a predefined
Coriolis force, resulting in a change in sensor output. The self-test response for each gyroscope axis
is defined in the gyroscope specification table (Section 6.1).
For further information regarding the Gyro & Accel control registers, please refer to the MPU-6050 Register
Map and Register Descriptions document.
谷歌翻译:
7.12自检
自检允许传感器的机械和电气部分的测试。为每个该自检
测量轴控制的陀螺仪和加速度控制寄存器的位可以被激活。
当自检被激活时,电子导致被致动的传感器,并产生一个输出信号。
的输出信号被用来观察自检响应。
自检响应被定义为如下:
自检响应具有自检功能的传感器的输出 - 传感器的输出未启用自我测试
自检响应被定义为每个加速度计的轴中的加速度计规格表
(6.2节)。类似地,对于陀螺仪轴,自检允许证明群众被移动相当于一个预定义的
科里奥利力,导致在传感器输出的变化。自检响应为每个陀螺仪轴
中定义的陀螺仪规格表(第6.1节)。
的陀螺仪和加速度控制寄存器的详细信息,请参阅MPU-6050的注册
地图和寄存器说明文件。
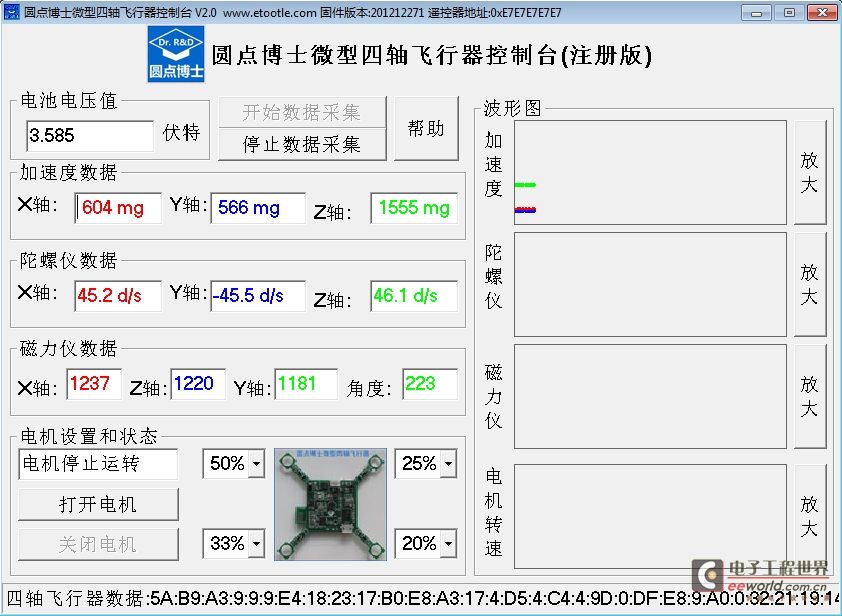
=======圆点博士小四轴飞行器MPU6050在自我测试模式下的读数=============
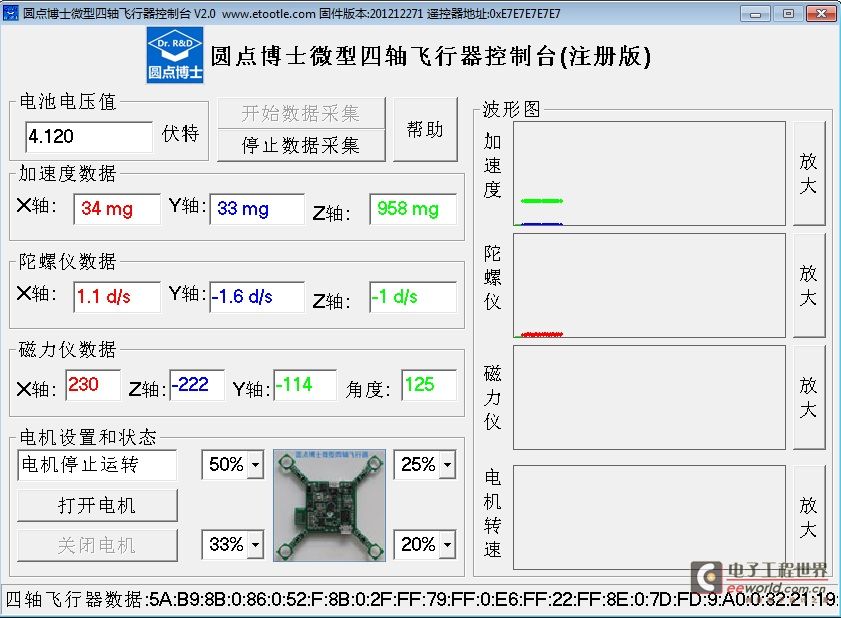
=======圆点博士小四轴飞行器MPU6050在非自我测试模式下的读数============
======圆点博士小四轴飞行器MPU6050数据计算========================
自检响应 = 具有自我测试功能的传感器的输出 - 未启用自我测试传感器的输出
MPU6050加速度X轴 =604mg-34mg=570mg
MPU6050加速度Y轴 =566mg-33mg =533mg
MPU6050加速度Z轴 =1555mg-958mg=597mg
MPU6050陀螺仪X轴 = 45.2度每秒-1.1度每秒=44.1度每秒
MPU6050陀螺仪Y轴 = -45.5度每秒-(-1.6度每秒) =-43.9度每秒
MPU6050陀螺仪Z轴 = 46.1度每秒-(-1.0度每秒)=47.1度每秒
======查看MPU6050数据手册========================

可见上述计算结果完全符合数据手册数据要求。从而验证了圆点博士小四轴飞行器中对MPU6050的软硬件设计
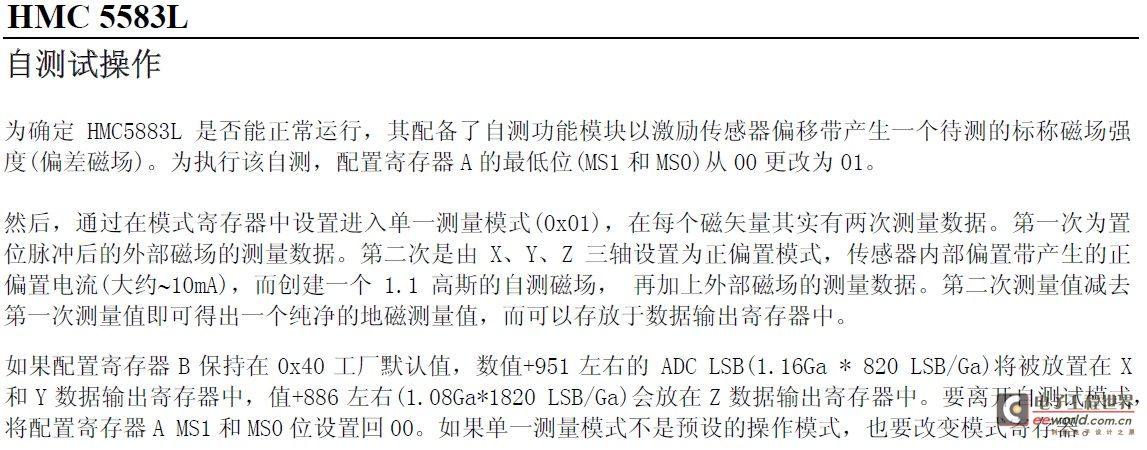
=======我们再来看HMC5883L数据手册=============================
=======对比圆点博士小四轴飞行器HMC5883L在自我测试模式下的数据========
=======HMC5883L数据分析=============================
我们看到HMC5883L数据手册给出来的数值是 X,Y =951 Z=886
圆点博士小四轴飞行器HMC5883L在自我测试模式下的数据:
X=1237, Y=1181, Z=1220, 角度为223
不过MC5883L数据手册也有提到:
使用上节SELF TEST OPERATION(自测操作)所述的方法,用户可校准传感器的灵敏度的比例以使相互匹配。
因为装置放置在正偏置模式(或相对的负偏置模式) 对所有三轴都应用了已知的人造磁场,因而数据输出寄
存器中的ADC 测量结果可被用于传感器的比例校准。
同样的,内置自测试程序可以用来定期地补偿由于温度变化而带来的比例误差。通过将自测试的数据输出与
在已知的温度下得到的数据进行比较,可以找到一个补偿因数。例如,如果室温下自测试数据输出是1130,
而在当前温度下数据输出是1150,那么(1130/1150)的比例因子应该应用于所有当前的磁场读数中。使用
这种方式无须用到温度传感器。
也就是说,不同温度下,这个结果是有偏差的。所以,该数据验证了圆点博士小四轴飞行器中对HMC5883L的软硬件设计
本文含有来自论坛的附件或图片点击查看原帖附件。