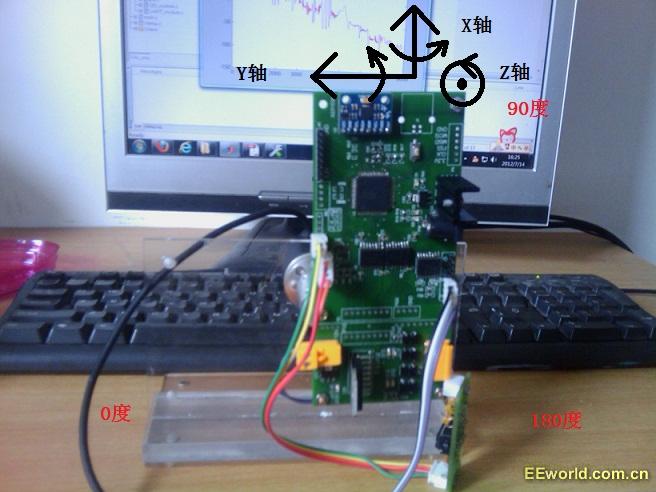
ПЦФЪЈ¬ОТТСѕУРТ»ёц±ИЅПєГµДЧ°ЦГАґµчКФґ«ёРЖчИЪєПµДЛг·ЁБЛЎЈјЗВјБЛXЦбYЦбµДјУЛЩ¶ИЦµєНZЦбµДНУВЭТЗКдіцЎЈ
І»µГІ»ЛµЈ¬
µҐµҐУГјУЛЩ¶ИАґЕР¶ПЅЗ¶ИХжµДєЬДСЎЈ
µ±ОТЧуУТЧЄ¶ЇµзВ·°еµДК±єтЈ¬YЦбµДјУЛЩ¶ИЦµ·ґУіБЛОТЧЄ¶ЇµДїмВэ+µзВ·°е±ѕЙнµДЅЗ¶ИЎЈ¶шґЛК±XЦбµДјУЛЩ¶ИЦµТІ»бКЬµЅАлРДБ¦µДУ°ПмЈє°ґАнЛµXЦбµДјУЛЩ¶ИЦµІ»»бі¬№э1gЈ¬їЙКЗОТјЗВјµДЅб№ыАґїґЈ¬ЧоёЯДЬґпµЅ1.09gЈ¬ОТНЖІвєЬїЙДЬКЗУЙУЪКЬµЅАлРДБ¦µДУ°ПмЎЈµ±И»ТІІ»КЗєБОЮ°м·ЁЈ¬ѕЯМеФхГґґ¦АнТФєуФЩЛµЎЈПИАґїґїґZЦбНУВЭТЗ»э·Ц°ЙЈЎ

НјЦРА¶Й«µДКЗ±аВлЖчО»ЦГНЖЛгіцАґµДЅЗ¶ИЈ¬ФЪТ»¶ЁіМ¶ИЙПїЙТФИПОЄКЗХжКµЦµЎЈємЙ«КЗУГZЦбНУВЭТЗ»э·ЦµГµЅµДЅЗ¶ИЦµЎЈ
ХвґОЗЧСЫїґµЅБЛНУВЭТЗ»э·ЦЛщОЅµДЖЇТЖБЛ°ЙЎЈІ»µГІ»ЛµБЅХЯПёЅЪІї·ЦХжµДєЬПсєЬПсЎЈµ«КЗЖЇТЖФхГґИҐµфДШЈїGo and see.