����ȥ��һ���з�����ǿ�չ����ܲ����ǶȵĶ����������Ƕ��������������ǻ��Ǽ��ٶȴ����������ھ��Ⱥ���Ӧ���ʵ����⡣�����ҳ�������һ�ַ�ʽ����������·�壩�ĽǶȣ��������ˣ�

Nikon�������������1000��/Ȧ��ʵ������Ƚϴ���������LM4F232��QEI�ķ�Ƶ֮���Լ�ܻ��10LSB/�ȵľ��ȡ���������·��ʱ�ڰ�����ֱܷ���ֱ��Ϊ3mm�Ŀס�����ͨ��һ��3X3��������+ֱ��Ϊ3mm����˿��ĸ���ܰѵ�·��̶��ڱ������������ˡ�U can see:

������������teacher chen����ĵ�һ���ϰ�...
Ȼ��Ϳ���������һ�µ�·��ת���ĽǶ��ˡ�ʹ���ѱ���������������.....������ʹ����...

��ʱ�����������廹�ǽ���LM4F232ȥ��Ӧ�ģ����ٶȴ������������ǵ����Ҳ����ˡ�Ȼ��LM4F232ͨ��һ���ĸ�ʽ�������������ɴ��ڷ�����λ����
����������п���������һֻ������ת����·�塣��������λ�����������ǿ����ˣ��������ͼ
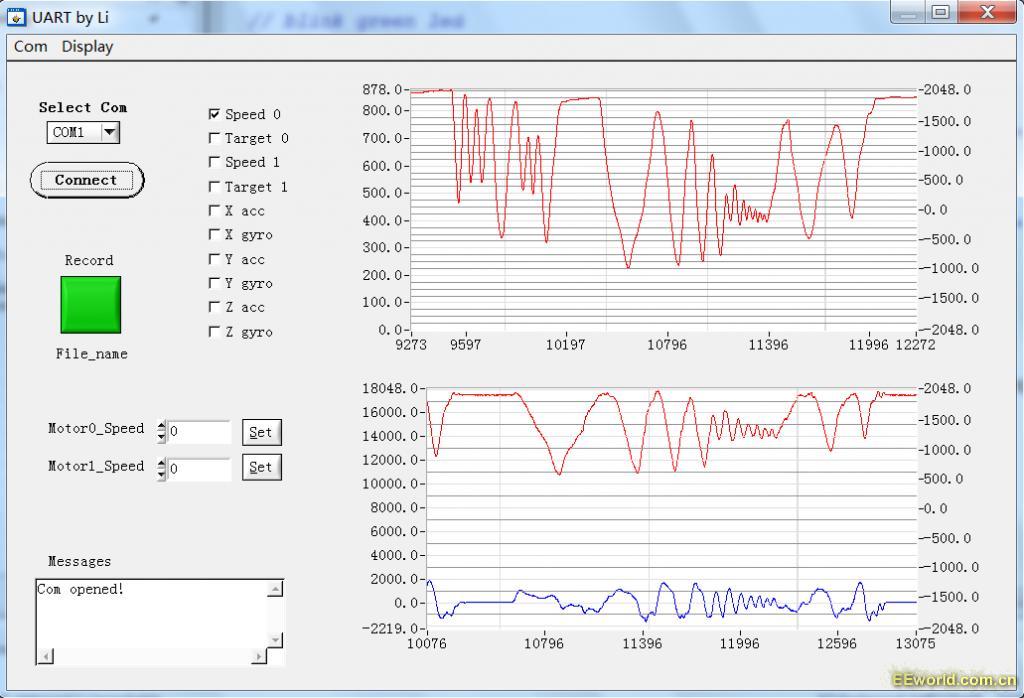
����������߱�ʾ��������λ�ã���ͼ���ߴ������ٶȴ�������ֵ�����������ɫ�ߴ��������ǵ�������������Ƿ��ģ�Ҫ����-1���ܺ���ͼ��Ӧ�ϣ�ǰ�벿��Ӧ����û���ȣ����Լ��ٶȴ������ͱ�������λ������Բ��ϡ�����Ч����δ�Ҽ��ʼ��ǰɡ�
Ŀǰ����λ�������Ѿ����˰���Щֵ��¼���ļ��еĹ��ܡ���һ��������matlab����һ�´���������ͽǶ�֮��Ĺ�ϵ����Ȼ�һ��Ǻ�������Ҹ������ѱ������̶�ס��Have Fun��
