Ή‘¥”¥σΥΡΒΡ ±ΚρΩ¥ΒΫ”–»ΥΉω≥ωΝΥΥΪ¬÷ΤΫΚβ≥ΒΘ§ΨΆ“Μ÷±‘Ψ‘Ψ”ϊ ‘ΓΘΈόΡΈΥΉΈώ≤χ…μΘ§“≤Ήή «ΡΟ≤Μ≥ω«°ά¥Ηψ’βΗωΘ§Φ”÷°Β± ±Υ°ΤΫ“≤≤ΜΙΜΓΘAnywayΘ§ΉνΫϋ≥ΟΉ≈ΙΛΉς≤Μ «ΧΊ±πΟΠ“―Ψ≠”–ΝΥ≥θ≤ΫΒΡ≥…ΙϊΓΘ
”ϓ”ύ ±ΦδΉωΝΥ’βΟ¥“ΜΩιΑεΘΚ
MCU-------LX4F232H5QC
DRIVER----L298N(–‘Ρή≤Μ’ΠΒΊ)
SENSOR----MPU-6050
ISOLATOR--ISO7240
ΉνΚσΉω≥ω≥…ΤΖ «’β―υΒΡΘΚ
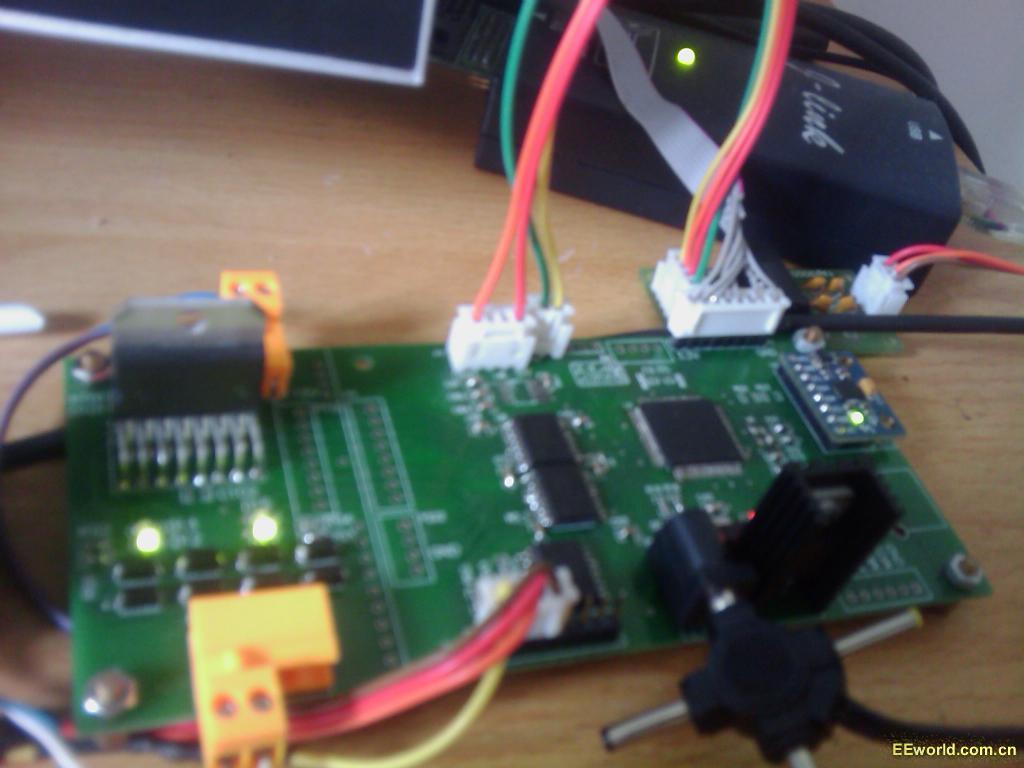
”–ΗωMAX2321(?)Μ≠¥μΝΥ,Έ“ά’Ηω»ΞΒΡΓΘ–“ΩςMCUΤΛ ΒΟΜ…’ΓΘ”“±ΏΆΜΤπΒΡΡ«ΩιΨΆ «¬ρΒΡMPU-6050ΡΘΩιΘ§œ÷‘Ύ“―Ψ≠¬δ«°ΝΥT_T,”ΟI2CΑ―ΥϋΚΆMCUΝ§Τπά¥ΓΘ÷–ΦδΒΡ–ΨΤ§ΨΆ «ISO7240Θ§Ζ¥’ΐ“≤ «≤ΜΜ®«°…ξ«κΒΡΘ§±»ΙβώνΚΟ”ΟΕύΝΥΓΘ
ΉνΚσΝ§…œΒγΜζ «’β―υΒΡΓΘ

ΒγΜζ–‘ΡήΚή‘ϋΘ§ΚσΟφΒΡ±ύ¬κΤς «Νν»ΥΖΔ÷ΗΒΡΝΫœΏΓΘΚΟΜ≥Ρν“‘«ΑΒΡΦΗ÷ßFaulhaber,≥§Ψ≤“τ+512œΏ±ύ¬κΤςΘ§”–«°ΝΥ‘Ό¬ρΦΗ÷ß ’≤ΊΓΘ
ΡΩ«ΑΒςΚΟΝΥPIDΚΆ¥ΪΗ–ΤςΓΘPID «άϊ”ΟΝΥLx4f232ΒΡ“ΜΕ‘QEIΘ®≤Μ»Μ‘θΟ¥Μα―ΓΥϊΘΩΘΩΘ©±Ψά¥ΜΙœκ”ΟΒΡUSBΘ§Άβ≤ΩΨß’ώ±ΜΈ“ΚΗΜΒΝΥΘ§Β»‘Ό”–ΝΥLX4F232‘ΌΚΗΩι–¬ΑεΑ…ΓΘ
Ήή’βΟ¥Η…Ω¥Ή≈“≤≤Μ «ΑλΖ®ΓΘΈ“ΉωΒΡΒγ¬ΖΑε≤Μ¥χΤΝΡΜΘ§≤Μ¥χ ΐ¬κΙήΘ§USB≤ΜΡή”ΟΝΥ–“ΚΟΜΙ¥χΗω¥°ΩΎΓΘΨΆΆ®Ιΐ¥°ΩΎΑ― ΐΨί¥ΪΒγΡ‘…œΑ…Θ§ΒγΡ‘“≤ΡήΆ®Ιΐ¥°ΩΎΩΊ÷ΤΒγΜζΒΡΉΣΥΌΓΘ”Οcvi±ύΝΥΗωΫγΟφΘ§“‘«Α «’β―υΒΡΘΚ
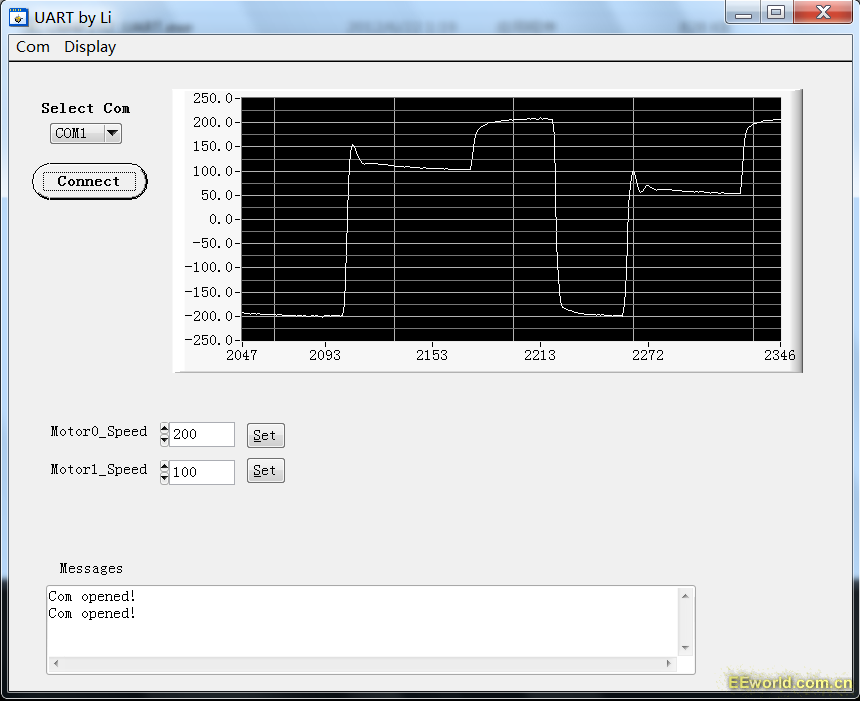
…œΆΦ÷ΜΡήΒςPID”ΟΘ§ΉνΕύΩΊ÷ΤΗωΥΌΕ»ΓΘΚσά¥œκΑ―¥ΪΗ–ΤςΒΡ ΐ÷Β“≤ΥΆ≥ωά¥Θ§ΨΆ±δ≥…ΝΥ’βΗωΙμ―υΉ”ΘΚ
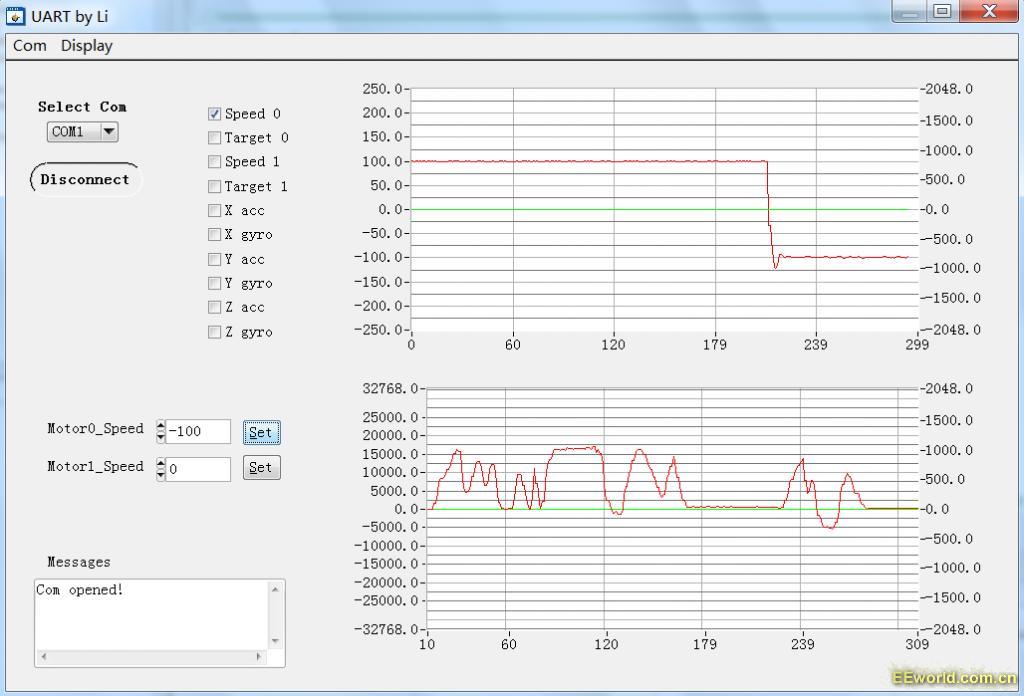
“ΜΕ‘±»ΖΔœ÷’φΒΡ «≥σΝΥΚήΕύΓΘœ¬ΟφΒΡStripChart”Οά¥œ‘ Ψ¥ΪΗ–ΤςΒΡ÷Β,…œΆΦΒΡΚλœΏ «Φ”ΥΌΕ»¥ΪΗ–ΤςΒΡ÷ΒΘ§Έ“ΜΈΕ·Βγ¬ΖΑε≈ΣΒΟΓΘ
ΡΩ«ΑΜΙ”–Ης÷÷Ιν“λΒΡΈ Χβ”–¥ΐΫβΨωΘ§”»Τδ «‘ΙΡνΒΡMPU-6050...
ΗΘάϊΆΦΘ§7‘¬12ΡψΕ°ΒΡΘ§≈Σ–Γ“ΜΒψΒΆΒς

 QQ±»Ϋœ…Ό…œΘ§”–…ΕΈ Χβ÷±Ϋ”Έ ΚΟΝΥ
QQ±»Ϋœ…Ό…œΘ§”–…ΕΈ Χβ÷±Ϋ”Έ ΚΟΝΥ