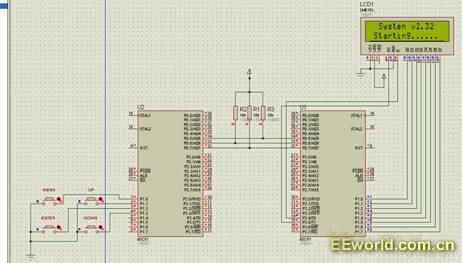
系统启动界面。
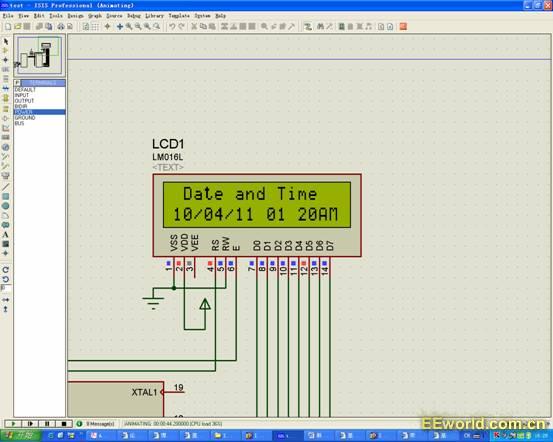
RTC 界面
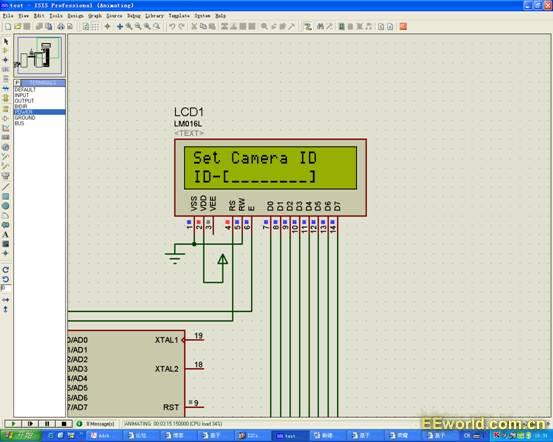
设置ID界面
背景:左边的CPU模拟DSP,右边的CPU模拟EM78P5840。
DSP扫描按键,(分别是MENU,UP,DOWN,ENTER)
MENU为显示页面切换。
ENTER为参数设置按键。
UP用来增加参数。
DOWN用来减少参数。
DSP通过I2C总线传输给MCU,由MCU驱动LCD显示相应界面。
接收部分:
#include<reg51.h>
#include<intrins.h>
#define uchar unsigned char
#define uint unsigned int
#define ulong unsigned long
#define KEY_MENU 0xFE
#define KEY_ENTER 0xFB
#define KEY_UP 0XFD
#define KEY_DOWN 0XF7
#define page_time_set 1
#define page_ir_set 2
#define page_mode_set 3
#define page_quality_set 4
#define page_delay_set 5
#define page_sequence_set 6
#define page_erase_set 7
#define page_id_set 8
#define page_sureerase_set 9
#define page_clrmemo_set 10
sbit SDA = P0^7;
sbit SCL = P0^6;
sbit i2c_ctl =P0^5;
uint data time_counter=0;
uchar data second=0;
uchar data minute=20;
uchar data hour=01;
uchar data day=11;
uchar data month=04;
uchar data year=10;
uchar data time_point;
uchar image_delay_time=0;
uchar data page=0;
uchar idata id_num[8]={0x30,0x30,0x30,0x30,0x30,0x30};
uchar id_point=0;
uchar page5_sw=0;
uchar key_temp=0xff;
uchar key_code=0xff;
uchar key_value[2]={0xff,0xff};
uchar enter_counter=0;
bit ms20_ready=0;
bit minute_flag=0;
bit id_set_flag=0;
//uchar const code page1_up[16]=" System v2.32 ";
//uchar const code page1_down[16]=" Starting......";
//uchar const code page2_up[16]= " Date and Time ";
//uchar const code page2_down[16]="10/04/11 01:20AM";
//uchar data key_value[3]={0xff,0xff,0xff};
//uchar const all_page_up[][16]= {{ " Date and Time"},{"IR Event Count"},{" Image Mode"},{"Image Quallity"},{" Image delay"},{" Image sequence"},{"Eraser all Image"},{"Set Camera ID"},{" Enter = Erase"},{" Memory Clear "}};
//uchar const all_page_down[][16]={{"10/04/11 01:20AM"},{" 0 Reset?"},{">still< video "},{">Standard< High "},{" 1 min [ ]"},{" >1< 2 3"},{"0 Erase?"},{"ID-[________]"},{" [ ] = Cancel"},{" 0000 images"}};
uchar const page2_select[4]={0,6,8,14};
uchar const page3_select[4]={0,9,10,15};
uchar const page5_select[6]={2,4,6,8,10,12};
uchar const lcd_command[4]={0x38,0x0c,0x06,0x01};
#include <reg51.h>
#include <intrins.h>
#define uchar unsigned char
#define uint unsigned int
#define AddWr 0xa0 /*器件地址选择及写标志*/
#define AddRd 0xa1 /*器件地址选择及读标志*/
sbit Sda= P0^7; /*串行数据*/
sbit Scl= P0^6; /*串行时钟*/
sbit spi_ctl= P0^5; /*硬件写保护*/
void mDelay(uint j)
{
uint i;
for(;j>0;j--)
{
for(i=100;i>0;i--)
{
;
}
}
}
void delay( )
{
uchar i=20;
for(;i>0;i--)
{
_nop_();
}
}
/*发送起始条件*/
void start(void) /*起始条件*/
{
delay( );
Sda=1;
Scl=1;
delay( );
Sda=0;
delay( );
}
void stop(void) /*停止条件*/
{
delay();
Sda=0;
Scl=1;
delay( );
Sda=1;
delay( );
}
void Ack(void) /*应答位*/
{
//Sda=0;
delay( );
Scl=1;
delay( );
Scl=0;
delay( );
}
// void NoAck(void) /*反向应答位*/
// {
// Sda=1;
// delay( );
// Scl=1;
// delay( );
// Scl=0;
// }
void send(uchar Data) /*发送数据子程序,Data为要求发送的数据*/
{
uchar BitCounter=8; /*位数控制*/
uchar temp=Data; /*中间变量控制*/
do
{
delay( );
Scl=0;
//delay( );
if((temp&0x80)==0x80)/* 如果最高位是1*/
Sda=1;
else
Sda=0;
delay( );
Scl=1;
temp=temp<<1; /*RLC*/
//Data=temp;
BitCounter--;
delay( );
}
while(BitCounter);
Scl=0;
delay( );
}
//uchar Read(void) /*读一个字节的数据,并返回该字节值*/
// {
// uchar temp=0;
// uchar temp1=0;
//uchar BitCounter=8;
//Sda=1;
// do{
// Scl=0;
// _nop_ ();
//
// _nop_ ();
// _nop_ ();
//_nop_ ();
//Scl=1;
//_nop_ ();
//_nop_ ();
//_nop_ ();
//
//_nop_ ();
//if(Sda) /*如果Sda=1;*/
//temp=temp|0x01; /*temp的最低位置1*/
//else
//temp=temp&0xfe; /*否则temp的最低位清0*/
//if(BitCounter-1)
//{ temp1=temp<<1;
//temp=temp1;
//}
//BitCounter--;
//}while(BitCounter);
//return(temp);
//}
//void send_mcu_page(uchar page)
// {
// uchar i;
//EA=0;
//i2c_ctl=0;
//delay( );
//delay( );
// start(); /*发送启动信号*/
// send(0xa0); /*发送SLA+W*/
//Ack();
// for(i=0;i<16;i++)
// {
// send(all_page_up[page][i]);
// Ack();
//mDelay(20);
//}
//for(i=0;i<16;i++)
// {
// send(all_page_down[page][i]);
// Ack( );
// }
//stop( );
// }
void send_mcu_info(uchar page,uchar key_code)
{
EA=0;
i2c_ctl=0;
delay( );
start( );
send(0xa0);
Ack();
send(page);
Ack( );
send(key_code);
Ack( );
stop( );
i2c_ctl=1;
delay( );
delay( );
EA=1;
}
// void read_from_mcu(uchar Data[],uchar Num)
//{
// uchar i;
//uchar *PData;
// PData=Data;
//for(i=0;i<Num;i++)
// {
// start();
// send(0xa0);
// Ack();
//Send(Address+i);
// Ack();
// start();
// send(0xa1);
// Ack();
//*(PData+i)=Read();
// Scl=0;
// NoAck();
// stop();
// }
// }
void timer0( void ) interrupt 1
{
TH0=(65536-20000)/256;
TL0=(65536-20000)%256;
P1=0XFF;
if(P1!=0xff)
{
key_temp=P1;
}
else
{
key_temp=0xff;
}
ms20_ready=1;
time_counter++;
if(time_counter>=25)
{
time_counter=0;
second++;
if(second>=120)
{
second=0;
minute++;
minute_flag=1;
if(minute>=60)
{
minute=0;
hour++;
if(hour>=24)
{
hour=0;
day++;
if(day>=30)
{
day=0;
month++;
if(month>=12)
{
month=0;
year++;
}
}
}
}
}
}
}
timer_init( )
{
TMOD=0x01; //定时器工作模式 方式一
TH0=(65536-20000)/256; //
TL0=(65536-20000)%256; //
TR0=1; //启动定时器一
ET0=1; //允许定时器0中断
EA=0;
}
void main()
{
//uchar i2c_state=0;
uchar kkk;
timer_init( );
i2c_ctl=1;
for(kkk=0;kkk<=50;kkk++)
{
mDelay(100);
}
page=1;
send_mcu_info(0,KEY_MENU); /*将初始化后的数值写入EEPROM*/
while(1)
{
uchar key_old;
uchar key_new;
if(page==0)
{
if(minute_flag)
{
minute_flag=0;
// display_normal_time( );
}
}
if(ms20_ready)
{
ms20_ready=0;
if(key_temp!=0xff)
{
// key_value[2]=key_value[1];
key_value[1]=key_value[0];
key_value[0]=key_temp;
if( key_value[1]==key_value[0] )
{
key_new=key_temp;
if(key_old!=key_new)
{
key_old=key_new;
switch(key_old)
{
case KEY_MENU:
send_mcu_info(page,KEY_MENU);
page=page+1;
if(page>8)
{
page=1;
}
break;
case KEY_ENTER:
if(page==page_erase_set)
{
//send_mcu_info(page,key_old);
enter_counter++;
if(enter_counter<3)
{
send_mcu_info(page,key_old);
}
else
{
// page=page_time_set;
//key_old=0xff;
enter_counter=0;
send_mcu_info(page,key_old);
page=page_time_set;
}
}
else{
send_mcu_info(page,key_old);
}
break;
case KEY_UP:
case KEY_DOWN: if( page==page_erase_set)
{
if(enter_counter==1)
{
enter_counter=0;
}
}
send_mcu_info(page,key_old);
break;
default:
key_old=0xff;
break;
}
}
}
}
else key_old=0xff;
}
}
}
发送部分:
#include<reg51.h>
#include<intrins.h>
#define uchar unsigned char
#define uint unsigned int
#define ulong unsigned long
#define KEY_MENU 0xFE
#define KEY_ENTER 0xFB
#define KEY_UP 0XFD
#define KEY_DOWN 0XF7
#define page_time_set 1
#define page_ir_set 2
#define page_mode_set 3
#define page_quality_set 4
#define page_delay_set 5
#define page_sequence_set 6
#define page_erase_set 7
#define page_id_set 8
#define page_sureerase_set 9
#define page_clrmemo_set 10
sbit SDA = P0^7;
sbit SCL = P0^6;
sbit i2c_ctl =P0^5;
uint data time_counter=0;
uchar data second=0;
uchar data minute=20;
uchar data hour=01;
uchar data day=11;
uchar data month=04;
uchar data year=10;
uchar data time_point;
uchar image_delay_time=0;
uchar data page=0;
uchar idata id_num[8]={0x30,0x30,0x30,0x30,0x30,0x30};
uchar id_point=0;
uchar page5_sw=0;
uchar key_temp=0xff;
uchar key_code=0xff;
uchar key_value[2]={0xff,0xff};
uchar enter_counter=0;
bit ms20_ready=0;
bit minute_flag=0;
bit id_set_flag=0;
//uchar const code page1_up[16]=" System v2.32 ";
//uchar const code page1_down[16]=" Starting......";
//uchar const code page2_up[16]= " Date and Time ";
//uchar const code page2_down[16]="10/04/11 01:20AM";
//uchar data key_value[3]={0xff,0xff,0xff};
//uchar const all_page_up[][16]= {{ " Date and Time"},{"IR Event Count"},{" Image Mode"},{"Image Quallity"},{" Image delay"},{" Image sequence"},{"Eraser all Image"},{"Set Camera ID"},{" Enter = Erase"},{" Memory Clear "}};
//uchar const all_page_down[][16]={{"10/04/11 01:20AM"},{" 0 Reset?"},{">still< video "},{">Standard< High "},{" 1 min [ ]"},{" >1< 2 3"},{"0 Erase?"},{"ID-[________]"},{" [ ] = Cancel"},{" 0000 images"}};
uchar const page2_select[4]={0,6,8,14};
uchar const page3_select[4]={0,9,10,15};
uchar const page5_select[6]={2,4,6,8,10,12};
uchar const lcd_command[4]={0x38,0x0c,0x06,0x01};
#include <reg51.h>
#include <intrins.h>
#define uchar unsigned char
#define uint unsigned int
#define AddWr 0xa0 /*器件地址选择及写标志*/
#define AddRd 0xa1 /*器件地址选择及读标志*/
sbit Sda= P0^7; /*串行数据*/
sbit Scl= P0^6; /*串行时钟*/
sbit spi_ctl= P0^5; /*硬件写保护*/
void mDelay(uint j)
{
uint i;
for(;j>0;j--)
{
for(i=100;i>0;i--)
{
;
}
}
}
void delay( )
{
uchar i=20;
for(;i>0;i--)
{
_nop_();
}
}
/*发送起始条件*/
void start(void) /*起始条件*/
{
delay( );
Sda=1;
Scl=1;
delay( );
Sda=0;
delay( );
}
void stop(void) /*停止条件*/
{
delay();
Sda=0;
Scl=1;
delay( );
Sda=1;
delay( );
}
void Ack(void) /*应答位*/
{
//Sda=0;
delay( );
Scl=1;
delay( );
Scl=0;
delay( );
}
// void NoAck(void) /*反向应答位*/
// {
// Sda=1;
// delay( );
// Scl=1;
// delay( );
// Scl=0;
// }
void send(uchar Data) /*发送数据子程序,Data为要求发送的数据*/
{
uchar BitCounter=8; /*位数控制*/
uchar temp=Data; /*中间变量控制*/
do
{
delay( );
Scl=0;
//delay( );
if((temp&0x80)==0x80)/* 如果最高位是1*/
Sda=1;
else
Sda=0;
delay( );
Scl=1;
temp=temp<<1; /*RLC*/
//Data=temp;
BitCounter--;
delay( );
}
while(BitCounter);
Scl=0;
delay( );
}
//uchar Read(void) /*读一个字节的数据,并返回该字节值*/
// {
// uchar temp=0;
// uchar temp1=0;
//uchar BitCounter=8;
//Sda=1;
// do{
// Scl=0;
// _nop_ ();
//
// _nop_ ();
// _nop_ ();
//_nop_ ();
//Scl=1;
//_nop_ ();
//_nop_ ();
//_nop_ ();
//
//_nop_ ();
//if(Sda) /*如果Sda=1;*/
//temp=temp|0x01; /*temp的最低位置1*/
//else
//temp=temp&0xfe; /*否则temp的最低位清0*/
//if(BitCounter-1)
//{ temp1=temp<<1;
//temp=temp1;
//}
//BitCounter--;
//}while(BitCounter);
//return(temp);
//}
//void send_mcu_page(uchar page)
// {
// uchar i;
//EA=0;
//i2c_ctl=0;
//delay( );
//delay( );
// start(); /*发送启动信号*/
// send(0xa0); /*发送SLA+W*/
//Ack();
// for(i=0;i<16;i++)
// {
// send(all_page_up[page][i]);
// Ack();
//mDelay(20);
//}
//for(i=0;i<16;i++)
// {
// send(all_page_down[page][i]);
// Ack( );
// }
//stop( );
// }
void send_mcu_info(uchar page,uchar key_code)
{
EA=0;
i2c_ctl=0;
delay( );
start( );
send(0xa0);
Ack();
send(page);
Ack( );
send(key_code);
Ack( );
stop( );
i2c_ctl=1;
delay( );
delay( );
EA=1;
}
// void read_from_mcu(uchar Data[],uchar Num)
//{
// uchar i;
//uchar *PData;
// PData=Data;
//for(i=0;i<Num;i++)
// {
// start();
// send(0xa0);
// Ack();
//Send(Address+i);
// Ack();
// start();
// send(0xa1);
// Ack();
//*(PData+i)=Read();
// Scl=0;
// NoAck();
// stop();
// }
// }
void timer0( void ) interrupt 1
{
TH0=(65536-20000)/256;
TL0=(65536-20000)%256;
P1=0XFF;
if(P1!=0xff)
{
key_temp=P1;
}
else
{
key_temp=0xff;
}
ms20_ready=1;
time_counter++;
if(time_counter>=25)
{
time_counter=0;
second++;
if(second>=120)
{
second=0;
minute++;
minute_flag=1;
if(minute>=60)
{
minute=0;
hour++;
if(hour>=24)
{
hour=0;
day++;
if(day>=30)
{
day=0;
month++;
if(month>=12)
{
month=0;
year++;
}
}
}
}
}
}
}
timer_init( )
{
TMOD=0x01; //定时器工作模式 方式一
TH0=(65536-20000)/256; //
TL0=(65536-20000)%256; //
TR0=1; //启动定时器一
ET0=1; //允许定时器0中断
EA=0;
}
void main()
{
//uchar i2c_state=0;
uchar kkk;
timer_init( );
i2c_ctl=1;
for(kkk=0;kkk<=50;kkk++)
{
mDelay(100);
}
page=1;
send_mcu_info(0,KEY_MENU); /*将初始化后的数值写入EEPROM*/
while(1)
{
uchar key_old;
uchar key_new;
if(page==0)
{
if(minute_flag)
{
minute_flag=0;
// display_normal_time( );
}
}
if(ms20_ready)
{
ms20_ready=0;
if(key_temp!=0xff)
{
// key_value[2]=key_value[1];
key_value[1]=key_value[0];
key_value[0]=key_temp;
if( key_value[1]==key_value[0] )
{
key_new=key_temp;
if(key_old!=key_new)
{
key_old=key_new;
switch(key_old)
{
case KEY_MENU:
send_mcu_info(page,KEY_MENU);
page=page+1;
if(page>8)
{
page=1;
}
break;
case KEY_ENTER:
if(page==page_erase_set)
{
//send_mcu_info(page,key_old);
enter_counter++;
if(enter_counter<3)
{
send_mcu_info(page,key_old);
}
else
{
// page=page_time_set;
//key_old=0xff;
enter_counter=0;
send_mcu_info(page,key_old);
page=page_time_set;
}
}
else{
send_mcu_info(page,key_old);
}
break;
case KEY_UP:
case KEY_DOWN: if( page==page_erase_set)
{
if(enter_counter==1)
{
enter_counter=0;
}
}
send_mcu_info(page,key_old);
break;
default:
key_old=0xff;
break;
}
}
}
}
else key_old=0xff;
}
}
}