ЧыЭъГЩвдЯТбщжЄТы
|

ЪгЦЕНВНтЃК
PackageВжПтЕижЗЃКLitchiCheng/ros2_package
ЦєЖЏmoveit_setup_assistant
ros2 launch moveit_setup_assistant setup_assistant.launch.py
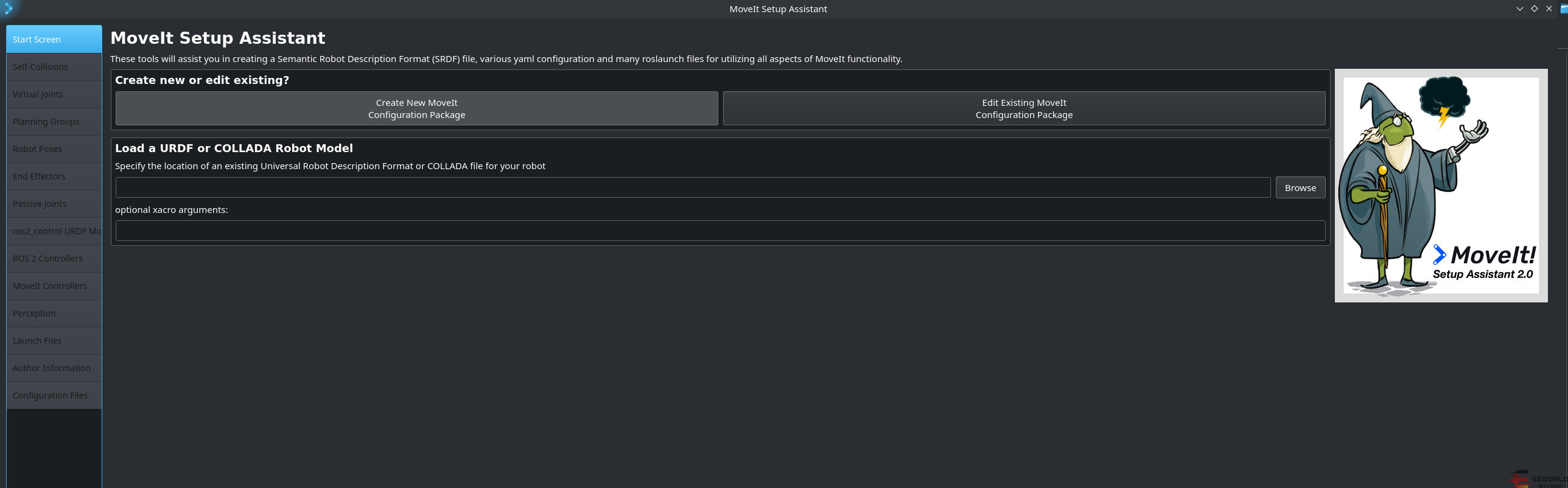
бЁдёЕМШыurdfЮФМўЃЌШчЙћurdfжав§гУЕФpackageЫбЫїВЛЕНЃЌЛсжБНгБРРЃЃЌашвЊЯШsource install/setup.bashЃЌОпЬхВЮПМЁЖROS2ЕМШыЛњаЕБлURDFОЙгаетаЉПгЃПSO-ARM100 RivzПЩЪгЛЏБмПгжИФЯЁЗ
[moveit_setup_assistant-1] Qt: Session management error: networkIdsList argument is NULL[moveit_setup_assistant-1] terminate called after throwing an instance of 'ament_index_cpp::PackageNotFoundError'
[moveit_setup_assistant-1] what(): package 'display_urdf_launch' not found, searching: [/opt/ros/humble]
[moveit_setup_assistant-1] Stack trace (most recent call last):
[moveit_setup_assistant-1] #31 Object "/usr/lib/x86_64-linux-gnu/libQt5Widgets.so.5.15.3", at 0x7e3740172e46, in QApplicationPrivate::sendMouseEvent(QWidget*, QMouseEvent*, QWidget*, QWidget*, QWidget**, QPointer<QWidget>&, bool, bool)
[moveit_setup_assistant-1] #30 Object "/usr/lib/x86_64-linux-gnu/libQt5Core.so.5.15.3", at 0x7e373f4b9e39, in QCoreApplication::notifyInternal2(QObject*, QEvent*)

ЕуЛїLoad FilesЃЌМгдиЭъГЩКѓЃЌгвВрЛсГіЯжФЃаЭЃЌКЭRvizжавЛбљЃЌПЩвдЭЯЖЏЯдЪО

ЯТвЛВНЕуЛїзѓВрЕФSelf-CollsionsХфжУЙиНкХізВЯрЙиЕФВЮЪ§ЃЌШчЙћУЛгаГіЯжlinkЃЌЙДЩЯгвЯТНЧЕФshow enabled pairs

ШЛКѓПЩвдЕуЛїGenerate Collision MatrixЩњГЩХізВОиеѓ

ЕуЛїзѓВрVirtual JointЃЌХфжУащЙиНкЃЌгУРДНЋЛљзљЗХжУдкФФЖљ

ХфжУPlanning GroupsЃЌетИізїгУдкMoveitЙцЛЎЕФЮФеТРяУцЮвУЧгУЙ§ЃЌОЭЪЧвЊжИЖЈЙцЛЎЕФзщУћЃЌБШШчso-arm100-groupsЃЌОЭЪЧетРяСЫЃЌдЫЖЏбЇЧѓНтЦїбЁдёвЛИіМДПЩЃЌOMPLЕФplanningЮвУЧбЁГЃгУЕФRTTConnect

add jointsЃЌашвЊАбетИізщРяУцЙцЛЎЕФЙиНкЖМбЁжаЃЌзюКѓХфКУЕФаЇЙћШчЯТ

ДДНЈЛњЦїШЫЮЛзЫЃЌШчhomeЮЛжУ

УЛгаФЉЖЫМазІЛђЦфЫћжДааЦїЃЌEnd EffectorsВЛгУЙм

діМгros2_controlЕНurdfЮФМўжа

здЖЏЬэМгЙиНкЙьМЃПижЦЦїЕНPlanning Groupжа

Moveit ControllersвВЪЧЭЌбљЃЌЕчЛњauto

УЛгаИажЊЦїМўЃЌШч3dДЋИаЦїЃЌЕудЦжЎРрЕФвВВЛгУХфжУ

МьВщЯТЕШЯТвЊЩњГЩЕФЮФМўЃЌФЌШЯЖМЪЧЙДЩЯЕФ

ЬэМгзїепаХЯЂ

бЁдёЙЄзїПеМфЯТsrcжааТНЈвЛИіpackageЃЌБШШчso_arm100_moveitЃЌШЛКѓЩњГЩЕФАќОЭЛсЕНРяУц

БрвыдЫаа
colcon build --packages-select so_arm100_moveit
source install/setup.bash
ros2 launch so_arm100_moveit demo.launch.py
